DECON Autonomous Disinfection Unit
August 2019 - June 2020
For the DECON project, our goal is to create a proof-of-concept autonomous robotic platform that can safely disinfect high risk areas/items in healthcare facilities to mitigate the risk of Healthcare Associated Infections (HAIs) without disrupting regular healthcare workflow. To achieve this, our team's goal is to design a proof-of-concept prototype that can autonomously navigate itself between fixed ROIs, identify target disinfection with computer vision, and execute a disinfectant spray and UVC radiation disinfection routine on fixed objects. The project is a course project for Leading Innovation Design Team, and was sponsored by the Johns Hopkins University Applied Physics Laboratory.
Our team was able to develop a prototype that was able to navigate in a controlled environment, identify a subset of target objects, and perform the disinfection routine.
Contributions
For this project, my main contributions include:
- Design of the robot chassis and layout of robot components.
- Hardware integration and testing (sensors, motors, robot arm, etc.).
- Design and testing of the robot's power systems.
- Sourcing of robot components within project budget.
Skills used/learned
- Robot Operating System (ROS)
- Mechanical design
- Circuit design & power management
- System integration & testing
- Robot navigation strategies and sensor
The robotic system is mainly divided into three main operational subsystems: Navigation, Detection, Disinfection. Robot operation is implemented through ROS (Robot Operating System).
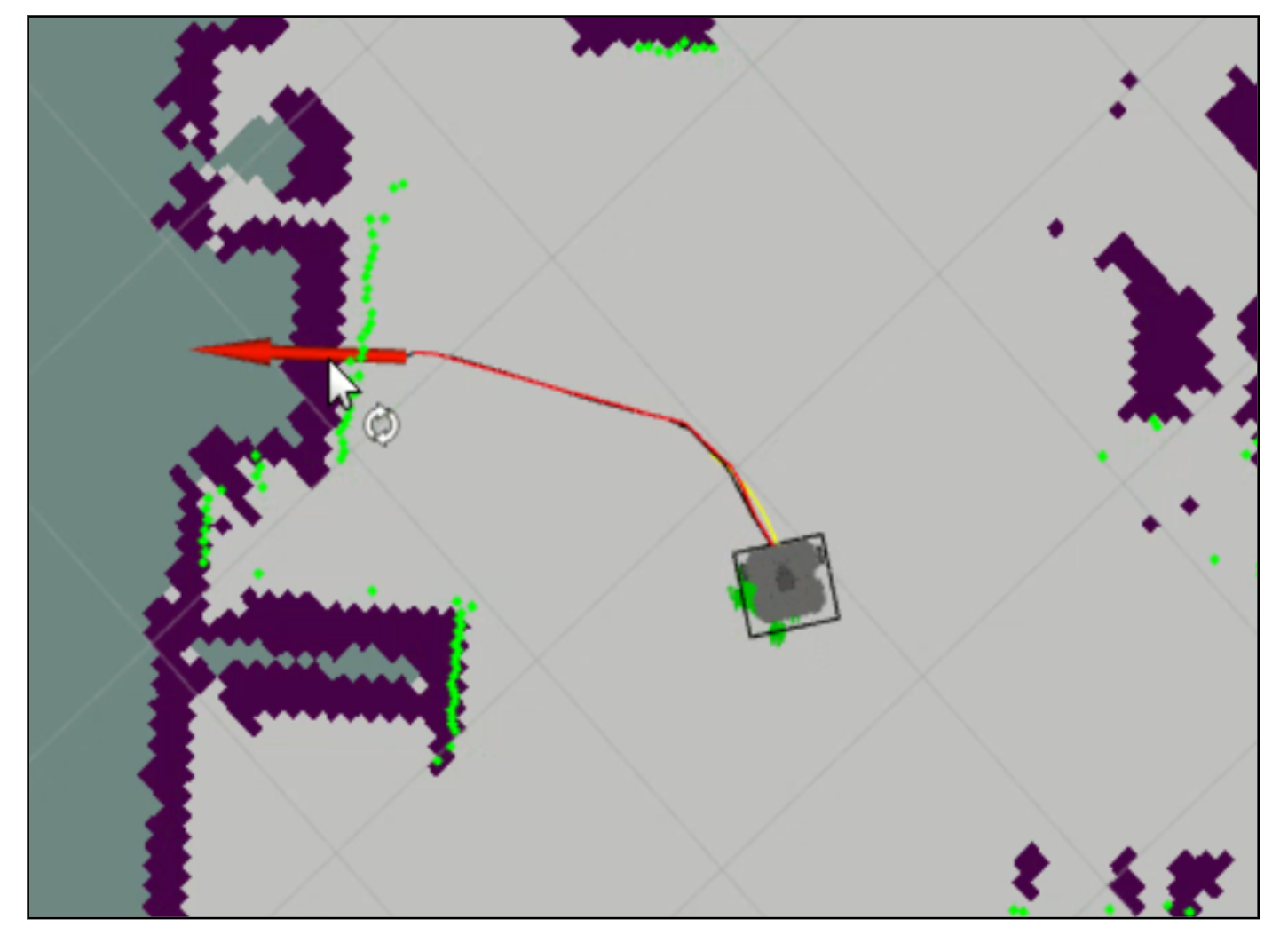
For Navigation, the robot relies on a LiDAR and SLAM to navigate in a dynamic environment like that of a healthcare facility. We used a Robotis TurtleBot3 Waffle as our base robot chassis.
For Detection, we want the robot to be able to identify, categorize, and localize disinfection targets (in our prototype setup: doorknobs and light-switches) within a specified ROI, after the robot has navigated to the general area.

To do this, we used a Zed stereo camera for object detection and localization. A Faster RCNN algorithm trained on the Open Images dataset from Google, augmented with our own target images, is used to recognize and categorize objects.
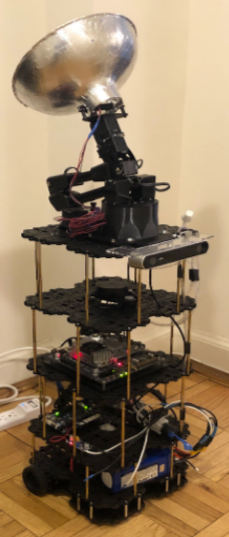
For Disinfection, to eliminate MRSA and other bacterium, we deployed a combined disinfection approach, using both commercial disinfectant spray delivered through a peristaltic pump and an electronically controlled sprayer, as well as a UVC LED array emitting 250-260 nm wavelength UV light for disinfection to deactivate bacterial DNA.
To ensure safety, the entire disinfection system is contained within a disinfection cone, mounted on a 5-DoF robotic arm. The disinfectant sprayer is placed at the base of the cone, and the UVC LEDs are radially positioned around the cone. The cone itself is reflective on the inside to maximize the amount of UVC delivered to the object surface.