Sanaria Mosquito Dissection Robot
August 2021 - Current
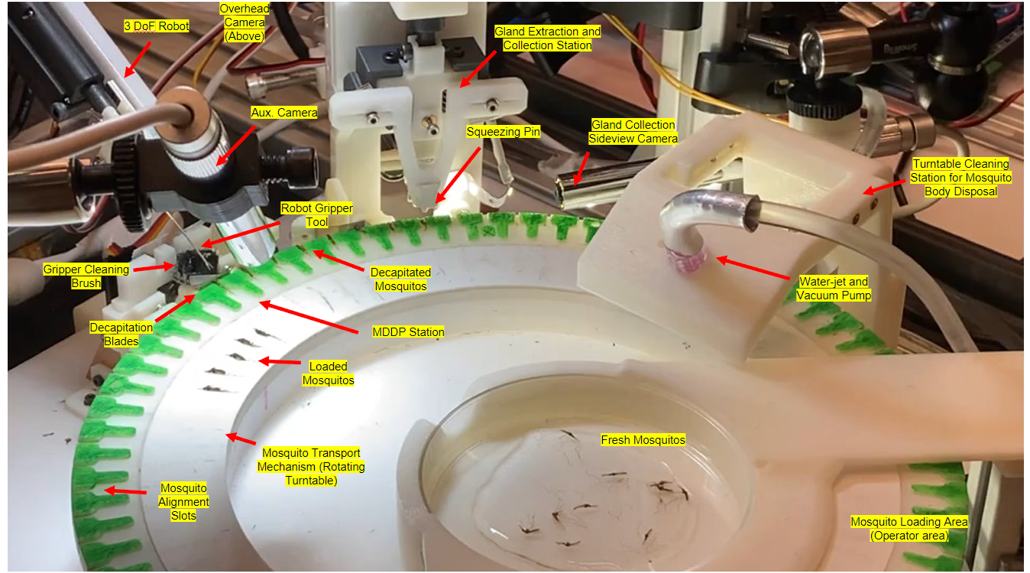
Malaria is a deadly disease that affects millions of lives globally. The deployment of a proven PfSPZ vaccine by Sanaria, Inc. can drastically increase effectiveness of Malaria protection efforts. One key step in production is the extraction of sporozoites from mosquito salivary glands. This task is currently performed manually by skilled operators, which can be both time and labor intensive.
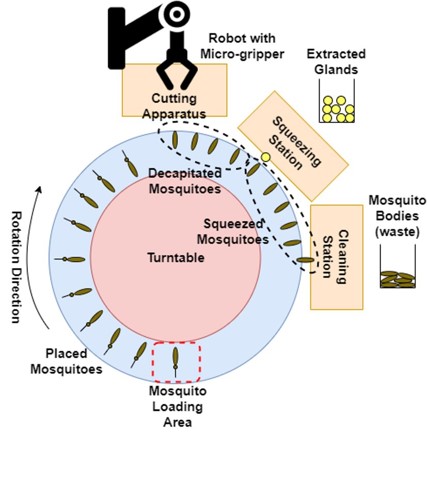
The combined team at CIIS and Sanaria are developing an autonomous robot system that can perform this mosquito microdissection and salivary gland extraction process. The goal for this platform is to be able to perform this complex manipulation procedure with minimal operator intervention, all while maintaining high success rates and high throughput.
Contributions
For my MSE thesis, I directly contribute to the project's controls and software systems. My main contributions include:
- Implemented software for the mosquito microdissection's process workflow
- Transitioned the robot's software from a single threaded script to a ROS framework
- Implemented runtime error detection and failure recovery methods
- Integrated computer vision components and data logging methods for image processing and system failure analysis
- Revamped robot calibration procedures and configurations to automate hardware and vision calibration
- Designed and implemented communication interfaces with robot hardware and controllers (Arduino & Galil)
- Developed in-depth system design and usage documentation
I have also represented the group at a number of public project presentations, and I am expected to be a main contributor for upcoming publications.
Future Work
Between the system's most recent progress report publication in August 2021 and today, much of the project's work has been dedicated to revamping the software architecture and further automating steps in the mosquito processing workflow that have not been implemented before.
More recently, the system has been fully transitioned and equipped with many more tools for system fine-tuning and failure analysis. With this new milestone reached, my future work will be in developing methods to further improve processing success rates, improve processing throughput via simultaneous processing of mosquitos, and improving system usability with operational and calibration user interfaces.
Skills used/learned
- Robot software architecture design
- Robot hardware and vision-based calibration
- Robot workflow optimization
- Robot Operating System (ROS)
- C++ and Python object-oriented programming
- Actuator control and interfaces
- Data structures and databases (SQL)
- Project management, task delegation, and communication